Maintain your turf at the highest quality from the comfort of your air conditioned office or anywhere in the world Click here to ask Jetson AI about how to maintain your turfgrass
Our new reel mower - lower cost, much les energy use, safer and higher quality cut than rotary mower
Here is our previous commercial electric mower traveling a mowing pattern at Wheaton Regional Park in Maryland.
Safety is our biggest concern. Can you do this on a rotary mower?
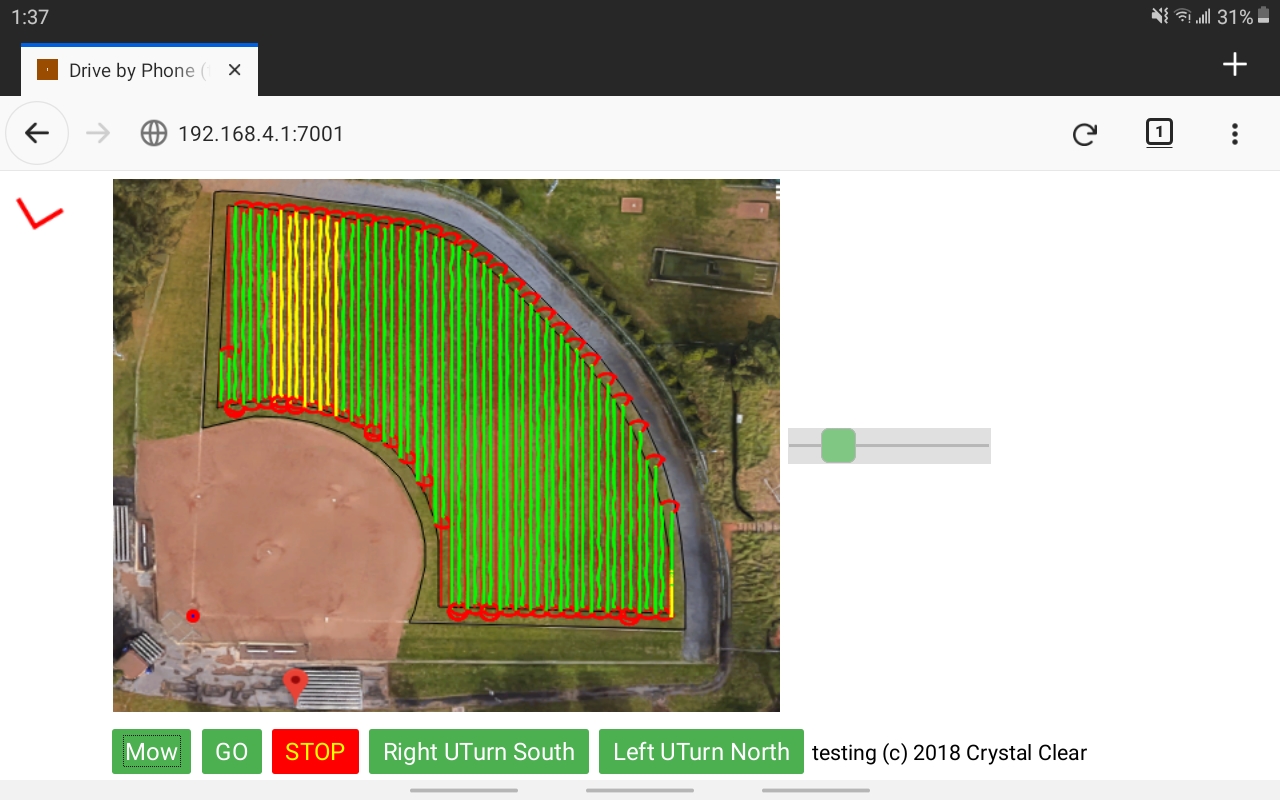
Here is what it looks like from the aerial view.
Next up? Ask us about autonomous snow removal and reel mowers for fairways
Increase quality and reduce cost with our robot mowers
We make small, light, low cost robots that can map your soil moisture, perform soil sampling and pest surveys, aerate, apply nutrients and chemicals only where they are needed
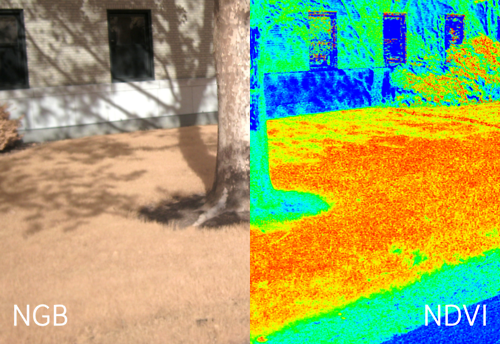
Our robots can multispectral scan your turf every day, to detect wilt and disease before it is visible to the human eye
Our robots can see in 3D This makes them safer and lets them mow when gps reception is lost.
Peter James loves growing things using technology. Here's a video on the hydronpics systems he did
for University of DC
Many Juristictions now ban the use of pesticides on private lawns and athletic fields.
We can provide weed control robots that dection, classify, outline and precision map (2 cm) weeds for removal
and continual follow up.
Our robots are seeing things.
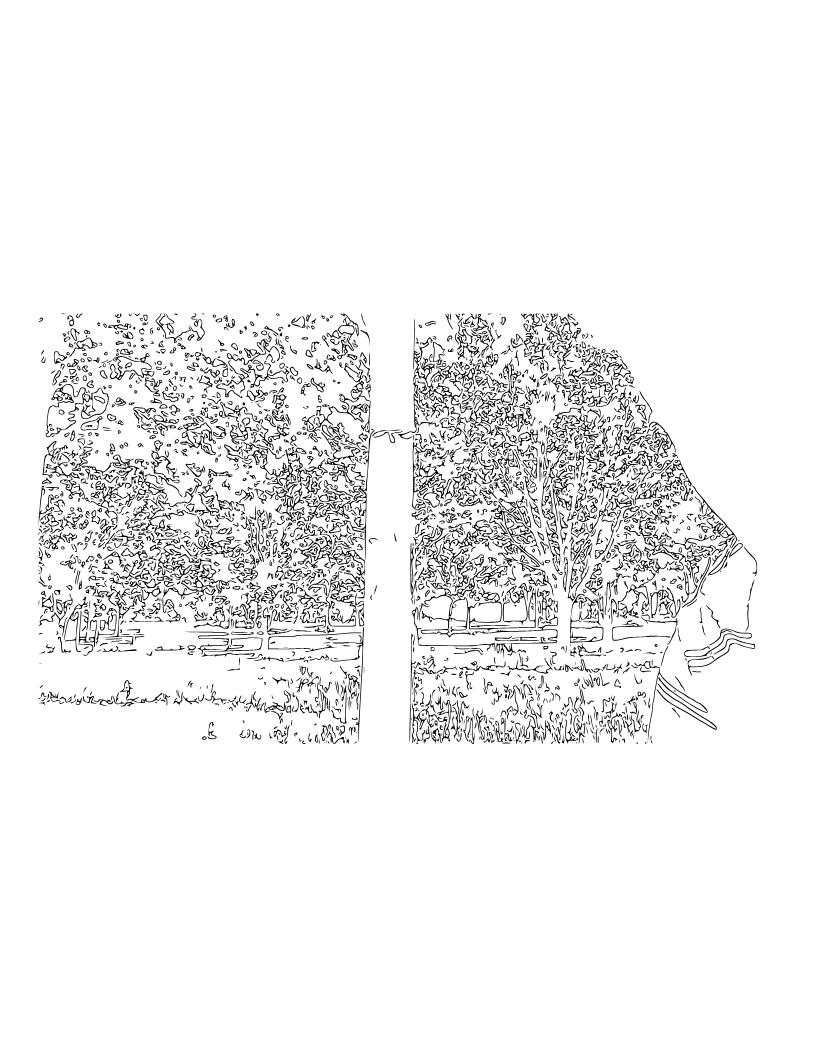
Below is a vision system to map tree positions and girth on a local tree farm.
Machine vision allows us make a precise 3D map of your site. The map is a referemce system that
provides additional positioning ie RTK GPS and compares "empty site" 3D model to realtime 3D scans
to detect any nearby obstacles.
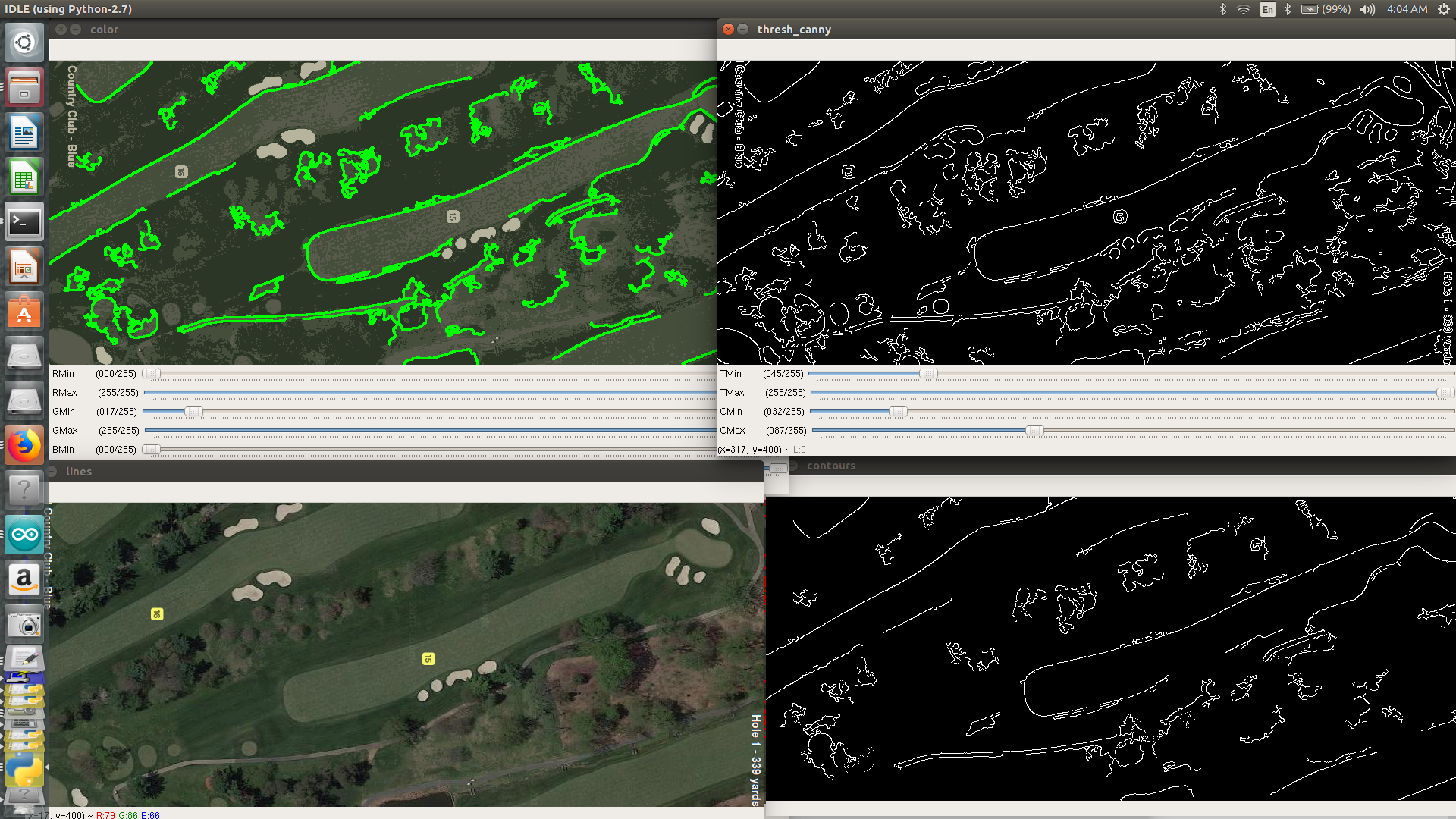
From aerial photos we can capture perimeters to direct the mowers where to mow and with which mower (ie. frairways, greens, approaches). Mounting cameras on mowers assists other positioning systems for a sharper cut line. This filter finds bunkers.
Aerial 3D mapping doesn't provide the resolution and accuracy needed for autonomous mowing. Envision your course as shown below with the detail of the house and tree above.
Using forearm and finger skeleton bone tracking sensors, we can provide low cost labor from
foreign countries to perform tasks of high dexterity in the fields and processing centers.
This system will also be used to train robots to learn these tasks.
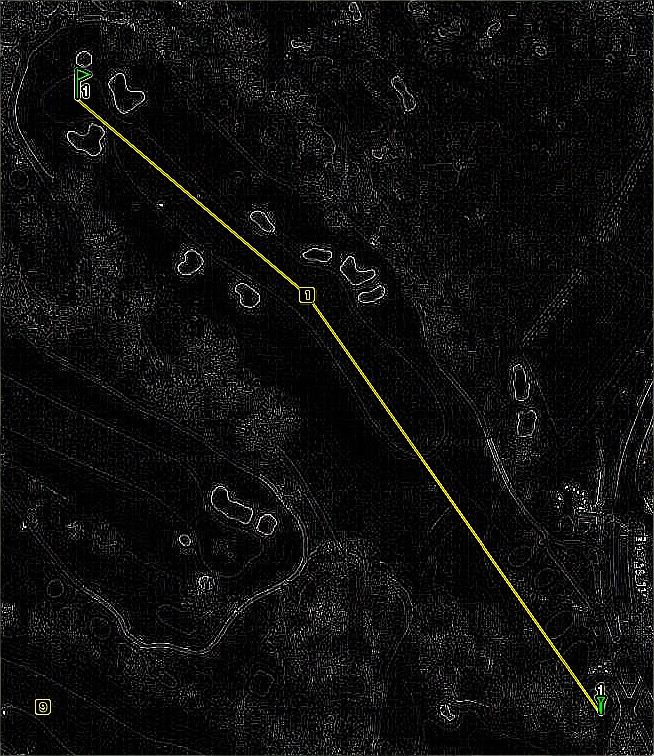
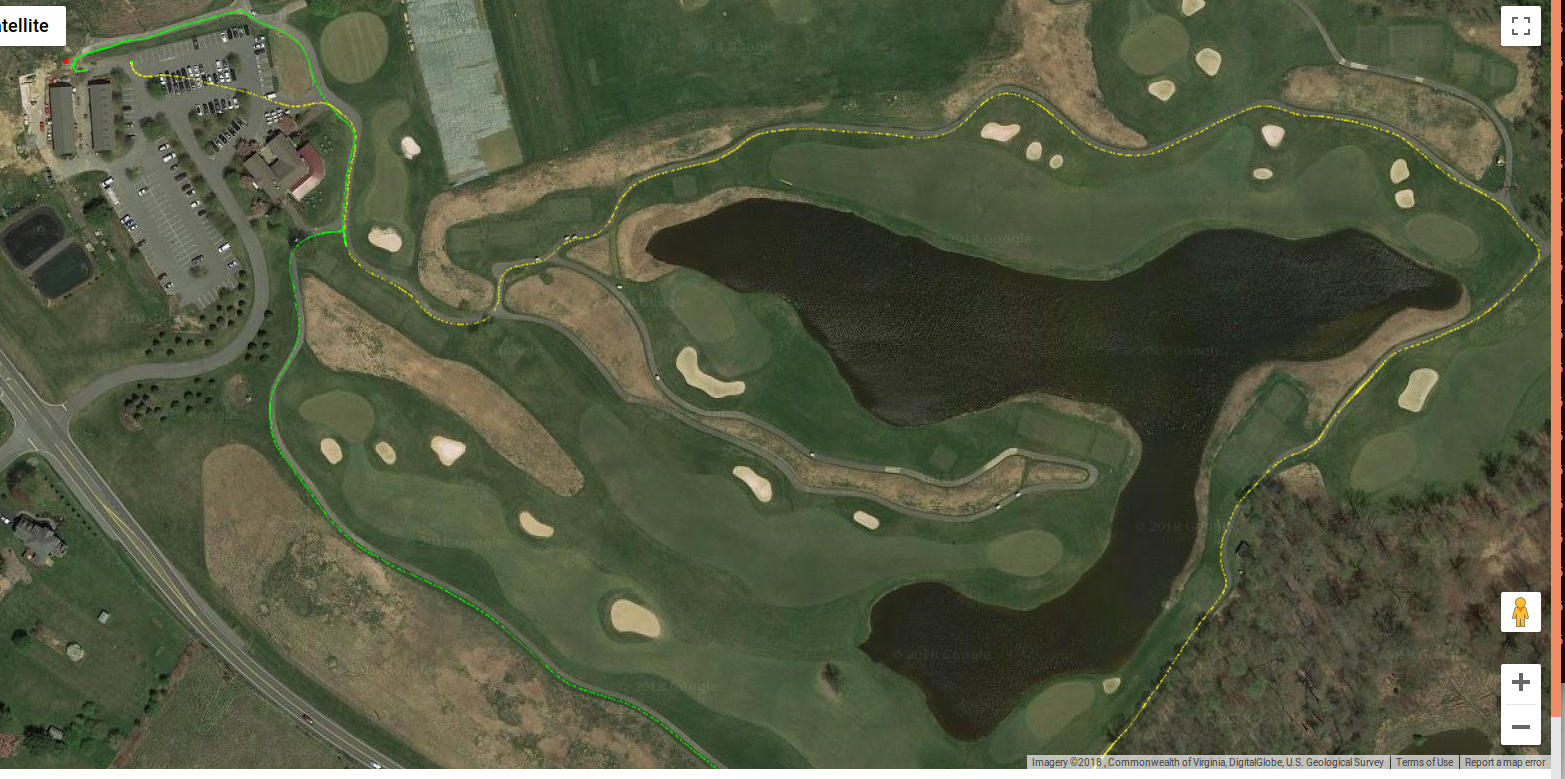
Below is some test data from Blue Mash golf course. Green data points are "fixed" data, yellow points are "float" reception which not as precisise as fixed. The rover reciever was mounted on the roof of a golf cart.
Our GPS was offset a little south and west of google maps. We've fixed this since the mapping. Each site might have different offsets.
We traveled counter clockwise in the mapping below. Notice the "fix" was lost along the tree line and never recovered. The advantage of a dual frequency RTK GPS receiver is they can recover fixed mode in a few seconds. Running in float mode is good enough to return to the shop or to a known point to re-acquire "fixed" mode satelite lock. Float mode is also probably good enough to mow roughs, survey turf health, and material applications.
Since there are many different vehicles on golf courses and many courses lease their equipment, it would be ideal to have a robot that could operate all these vehicles without having to modify any equipment.
Below is a Nasa humaniod robot Peter has programed. Peter got the robot to walk to the doorway, push the button to open the door and after a few tries made it past the finish line without failing. His fastest time was 10.72 seconds. Nasa's valker robot cost $5 million. We are working on a low cost version that could operate all your turf equipment without the need to modify your equipment.
We are applying genetic algorithms and deep learning to train the robots . Below is an example of using genetic algorithm to get robots to walk better.
In fact this humanoid "toy" robot is already driving a car.
We re working on applying genetic algorithms to evolve millions/billions of machine vision and AI methids to every golf course's aerial photos. In order to automate the extraction of mowing aera permiters. This will automate the task of programing the mowers and other equipment for each golf course.
Here is software that detects and tracks moving objects. This is only one of many algorithms we are implimenting that will keep the public and workers safe.
Below is a different software routine that was written to find parking spaces. We are modifying it to detect out-of-place objects and things the mower is getting too close to.
We are developing a reel mower version. This is designed to operate in swarms. It uses less energy and provides a better cut than rotary mowers.
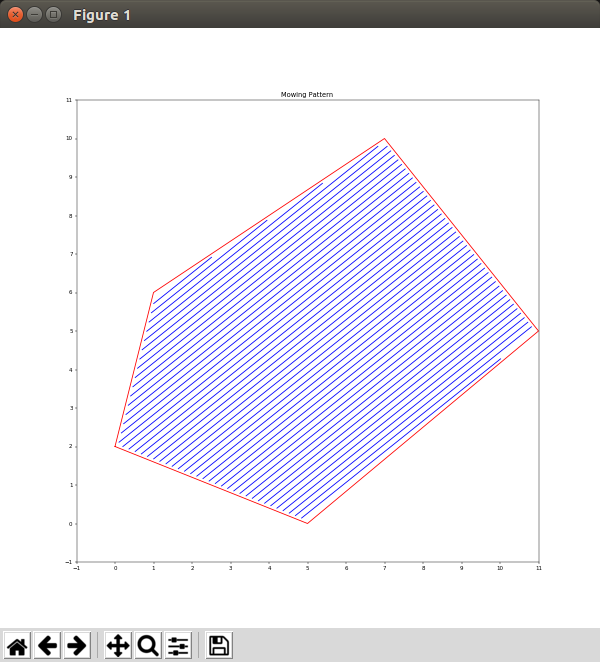
One of our developer wrote some software to fill any polygon area with parallel mowing pattern.
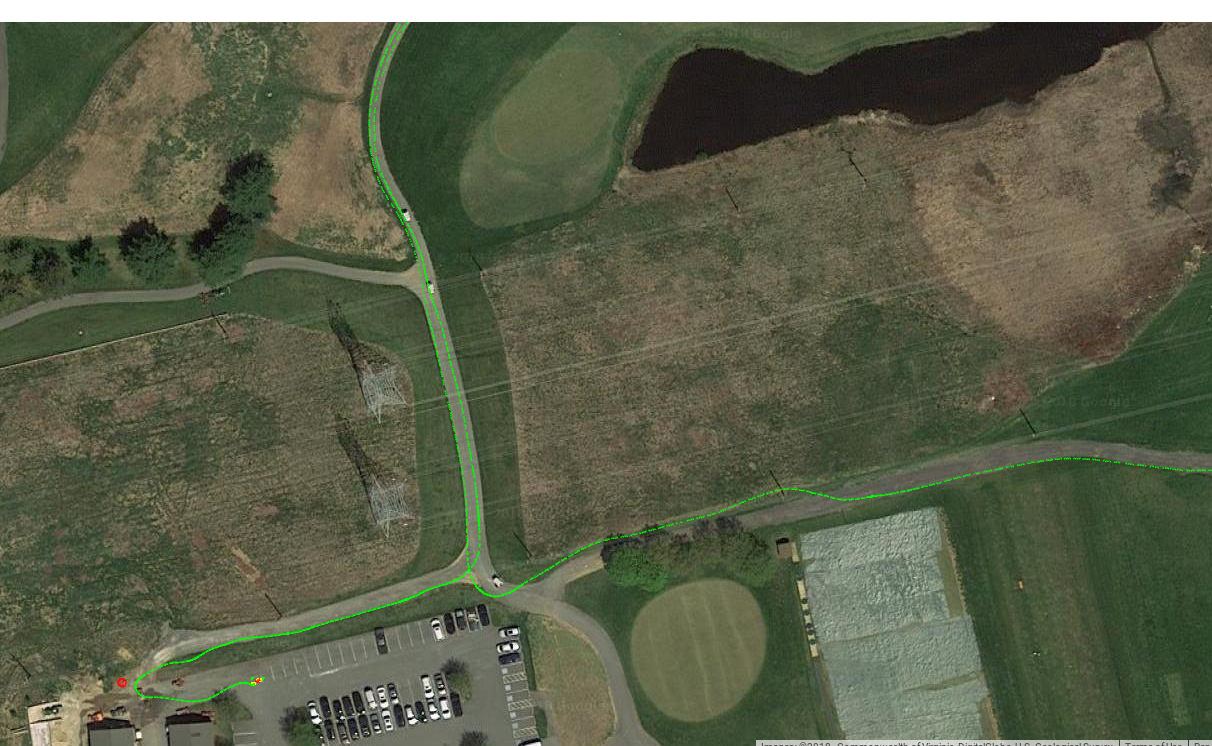
Here is the GPS tracking of a golf cart driving a mowing pattern at our develop site, Blue Mash Golf course. Using the RTK GPS base rover pair provided by Ublox. The pair of RTK recievers and radios is just under $400.
Contact Peter James for more info
240 938-8439
peter@turfrobots.us